 В продажу поступил новый высокотехнологичный программный продукт - Micro TRACE MODE 6 с адаптивным регулированием для контроллеров МФК, КРУИЗ, MicroPC, Fastwel, ROBO и плат в/в. В продажу поступил новый высокотехнологичный программный продукт - Micro TRACE MODE 6 с адаптивным регулированием для контроллеров МФК, КРУИЗ, MicroPC, Fastwel, ROBO и плат в/в.
Micro TRACE MODE устанавливается в контроллерах и программируется в удобной интегрированной среде разработки TRACE MODE 6 для Windows на любом из 5-и языков программирования  стандарта МЭК 61131/3. Программа содержит встроенные драйверы УСО контроллеров и имеет открытый формат для разработки пользовательских драйверов на языке ST или Си. стандарта МЭК 61131/3. Программа содержит встроенные драйверы УСО контроллеров и имеет открытый формат для разработки пользовательских драйверов на языке ST или Си.
Встроенные функции адаптивного регулирования (адаптивной самонастройки PI, PID и PDD-регуляторов), позволяют легко организовать регулирование параметров технологического процесса по улучшенным вариантам PI, PID, PDD и модального законов с возможностью автоматического (разового или периодического) вычисления их оптимальных настроек.
Библиотека алгоритмов адаптивного регулирования TRACE MODE 6, поддержанная в Micro TRACE MODE, содержит следующие модули:
- Адаптивное регулирование по ПИД-закону (модуль APID);
- Адаптивное регулирование по ПДД-закону (модуль APDD);
- Настройка PID-закона по скачку задания (модуль RJMP);
- Идентификация объекта (модуль IDNT);
- Настройка PID-закона по параметрам объекта (модуль CALC);
- Модальный регулятор (модуль MREG).
Модуль APID адаптивного регулирования используется для управления объектами, оснащенными пропорциональным исполнительным механизмом, а модуль APDD - для управления объектами, оснащенными интегрирующим исполнительным механизмом постоянной или переменной скорости отработки.  Оба модуля работают в два этапа: на первом этапе на вход объекта, наряду с сигналом с регулятора, подается пробный синусоидальный сигнал небольшой амплитуды. По амплитуде и фазе гармонической составляющей сигнала на выходе объекта контур адаптации путем изменения частоты пробных колебаний пытается отследить заданный фазовый сдвиг в объекте. Достигнув этого, контур рассчитывает оптимальные параметры настройки регулятора. На втором этапе генератор пробных колебаний и контур адаптивного регулирования отключаются, и начинает работать регулятор с оптимально настроенными параметрами. При необходимости процесс самонастройки можно запускать периодически, либо вообще не отключать. Оба модуля работают в два этапа: на первом этапе на вход объекта, наряду с сигналом с регулятора, подается пробный синусоидальный сигнал небольшой амплитуды. По амплитуде и фазе гармонической составляющей сигнала на выходе объекта контур адаптации путем изменения частоты пробных колебаний пытается отследить заданный фазовый сдвиг в объекте. Достигнув этого, контур рассчитывает оптимальные параметры настройки регулятора. На втором этапе генератор пробных колебаний и контур адаптивного регулирования отключаются, и начинает работать регулятор с оптимально настроенными параметрами. При необходимости процесс самонастройки можно запускать периодически, либо вообще не отключать.
Модуль RJMP (настройка ПИД-закона по скачку задания) обеспечивает подстройку параметров регулятора при каждой смене сигнала задания (если модуль включен в работу). Обычно достаточно трех-четырех небольших скачков по сигналу задания, чтобы параметры настройки регуляторы приблизились к оптимальным значениям. Модуль имеет высокое быстродействие, прост и нагляден в работе.
Модуль MREG автоматически рассчитывает оптимальные для данных параметров объекта коэффициенты модального регулятора с наблюдателем полного порядка и переходит в режим управления. Наличие в структуре регулятора цифровой модели объекта и наблюдателя позволяет сформировать упрежденный по времени на величину запаздывания выход объекта. Такой подход обеспечивает высокое качество управления для объектов с любым, даже очень большим запаздыванием. Модальный регулятор может обеспечить в два - три раза большее быстродействие, чем оптимально настроенный ПИД регулятор, при значительно меньшей чувствительности к шумам в канале измерения.
Модуль CALC, получая от модуля IDNT нормированные параметры передаточной функции объекта, автоматически рассчитывает оптимальные значения коэффициентов цифровых ПИ или ПИД регуляторов в форме, используемой в TRACE MODE (звено PID), выдавая коэффициенты KP, KI, KD для периода опроса канала, в котором работал модуль IDNT. Это расширяет возможности использования обычного ПИД регулятора.
Программы адаптивного регулирования для Micro TRACE MODE можно отлаживать online в редакторах TRACE MODE.
Контроллер, запрограммированный в Micro TRACE MODE, легко подключается к операторскому ПК на базе SCADA TRACE MODE 6 через встроенные протоколы I-NET И M-LINK (интеграция на уровне проекта). Также его можно подключить к другим SCADA через OPC-сервер. |









 Специалисты МУП «Костромагорводоканал» завершили новый проект автоматизации технологических процессов на основе российской SCADA TRACE MODE (Адастра, Москва). В промышленную эксплуатацию сдана "Система автоматизации фильтров и отстойников Димитровских очистных сооружений г. Костромы".
Специалисты МУП «Костромагорводоканал» завершили новый проект автоматизации технологических процессов на основе российской SCADA TRACE MODE (Адастра, Москва). В промышленную эксплуатацию сдана "Система автоматизации фильтров и отстойников Димитровских очистных сооружений г. Костромы".
 Уже более 18-и лет цементный завод "Пролетарий" ОАО Новоросцемент (Новороссийск) силами собственных специалистов создает, эксплуатирует и развивает АСУ ТП на базе TRACE MODE (Адастра, Москва). За это время предприятием накоплен уникальный опыт последовательной разработки крупномасштабной, распределенной и масштабируемой АСУ ТП уровня предприятия в условиях эволюции компьютерных технологий: аппаратных платформ, ОС, коммуникаций и прикладного ПО.
Уже более 18-и лет цементный завод "Пролетарий" ОАО Новоросцемент (Новороссийск) силами собственных специалистов создает, эксплуатирует и развивает АСУ ТП на базе TRACE MODE (Адастра, Москва). За это время предприятием накоплен уникальный опыт последовательной разработки крупномасштабной, распределенной и масштабируемой АСУ ТП уровня предприятия в условиях эволюции компьютерных технологий: аппаратных платформ, ОС, коммуникаций и прикладного ПО. Компания АВТОМАТИЗАЦИЯ.ПРО (Симферополь, Крым) - применила системуTRACE MODE для разработки системы автоматизации технологических процессов и противоаварийной автоматической защиты газонаполнительной станции АВТОГАЗКОМПЛЕКТ - КРЫМ в г. Бахчисарае.
Компания АВТОМАТИЗАЦИЯ.ПРО (Симферополь, Крым) - применила системуTRACE MODE для разработки системы автоматизации технологических процессов и противоаварийной автоматической защиты газонаполнительной станции АВТОГАЗКОМПЛЕКТ - КРЫМ в г. Бахчисарае. ТРЦ "ОБЛАКА СИТИ" имеет площадь 48 тысяч квадратных метров. В нем расположены 80 магазинов, 8-ми зальный кинотеатр, кафе, рестораны, паркинг. В 2019 г. «Интегра Лайт» выполнила проектирование, разработку в SCADA TRACE MODE и монтаж системы диспетчеризации инженерных систем здания ТРЦ. В 2020-м АСДУ была расширена и модернизирована по заявкам службы эксплуатации ТРЦ.
ТРЦ "ОБЛАКА СИТИ" имеет площадь 48 тысяч квадратных метров. В нем расположены 80 магазинов, 8-ми зальный кинотеатр, кафе, рестораны, паркинг. В 2019 г. «Интегра Лайт» выполнила проектирование, разработку в SCADA TRACE MODE и монтаж системы диспетчеризации инженерных систем здания ТРЦ. В 2020-м АСДУ была расширена и модернизирована по заявкам службы эксплуатации ТРЦ.

 Специалисты Завод Самсунг Электроникс в Калужской области использовали российскую SCADA TRACE MODE (Адастра, Москва) для разработки системы диспетчеризации и управления уличным освещением завода.
Специалисты Завод Самсунг Электроникс в Калужской области использовали российскую SCADA TRACE MODE (Адастра, Москва) для разработки системы диспетчеризации и управления уличным освещением завода.  ЗАО "АСУ технология" г.Тюмень использовало SCADA TRACE MODE 6 в АСУТП управления теплосетью г. Сургута, обеспечивающее ресурсосберегающее регулирование отпуска тепла для нужд отопления и горячего водоснабжения города.
ЗАО "АСУ технология" г.Тюмень использовало SCADA TRACE MODE 6 в АСУТП управления теплосетью г. Сургута, обеспечивающее ресурсосберегающее регулирование отпуска тепла для нужд отопления и горячего водоснабжения города. Известно, что до 80% ПИД регуляторов в промышленности настроены неоптимально. Неоптимальная настройка ПИД регуляторов ведет к повышенному расходу сырья и энергии, снижает качество производимой продукции, повышает износ оборудования.
Известно, что до 80% ПИД регуляторов в промышленности настроены неоптимально. Неоптимальная настройка ПИД регуляторов ведет к повышенному расходу сырья и энергии, снижает качество производимой продукции, повышает износ оборудования. 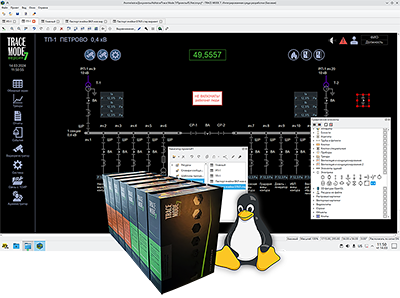 19 марта 2024 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1.0.2 профессиональной и базовой линий для операционных систем Linux и Windows.
19 марта 2024 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1.0.2 профессиональной и базовой линий для операционных систем Linux и Windows. 2 февраля 2024 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1.0.1 профессиональной и базовой линий для операционных систем Linux и Windows.
2 февраля 2024 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1.0.1 профессиональной и базовой линий для операционных систем Linux и Windows. 10 ноября 2023 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1 профессиональной и базовой линий для операционных систем Linux и Windows.
10 ноября 2023 г. компания АдАстра (Москва) выпустила новый релиз 64-разрядной версии SCADA TRACE MODE 7.1 профессиональной и базовой линий для операционных систем Linux и Windows.  12 декабря 2023 г. компания АдАстра сообщила об устранении уязвимостей в МРВ и NLL TRACE MODE 6.10.2, обнаруженных компанией Positive Technologies в рамках технологического сотрудничества в области кибербезопасности.
12 декабря 2023 г. компания АдАстра сообщила об устранении уязвимостей в МРВ и NLL TRACE MODE 6.10.2, обнаруженных компанией Positive Technologies в рамках технологического сотрудничества в области кибербезопасности. 
 Компания Айрон-Техник (г. Усть-Каменогорск, Казахстан) применила SCADA TRACE MODE (компании АдАстрА, Москва) для разработки и внедрения Автоматизированной системы коммерческого учета электроэнергии (АСКУЭ) на предприятиях ВК ЭНЕРГИЯ (г. Усть-Каменогорск, Казахстан).
Компания Айрон-Техник (г. Усть-Каменогорск, Казахстан) применила SCADA TRACE MODE (компании АдАстрА, Москва) для разработки и внедрения Автоматизированной системы коммерческого учета электроэнергии (АСКУЭ) на предприятиях ВК ЭНЕРГИЯ (г. Усть-Каменогорск, Казахстан).

 08.12.2023 Компания АдАстра (Москва) подвела итоги работы бета-тестеров SCADA TRACE MODE 7.1 для Linux.
08.12.2023 Компания АдАстра (Москва) подвела итоги работы бета-тестеров SCADA TRACE MODE 7.1 для Linux. 
 15 ноября 2023 года в рамках Восемнадцатого чемпионата по спортивному программированию компания АдАстра (Москва) провела Одиннадцатый студенческий SCADA-чемпионат по скоростному программированию в SCADA-системе.
15 ноября 2023 года в рамках Восемнадцатого чемпионата по спортивному программированию компания АдАстра (Москва) провела Одиннадцатый студенческий SCADA-чемпионат по скоростному программированию в SCADA-системе.  В марте 2023 года саратовская компания Интегра Лайт Серебряный авторизованный системный интегратор TRACE MODE в рамках импортозамещения в кратчайшие сроки разработала и внедрила операторский интерфейс системы коммерческого учёта энергоресурсов и диспетчерского управления инженерными системами завода Bosch в городе Энгельсе Саратовской области. В новой АСКУЭ и АСДУ применена новейшая 64-разрядная версия российской SCADA TRACE MODE 7 (Адастра, Москва).
В марте 2023 года саратовская компания Интегра Лайт Серебряный авторизованный системный интегратор TRACE MODE в рамках импортозамещения в кратчайшие сроки разработала и внедрила операторский интерфейс системы коммерческого учёта энергоресурсов и диспетчерского управления инженерными системами завода Bosch в городе Энгельсе Саратовской области. В новой АСКУЭ и АСДУ применена новейшая 64-разрядная версия российской SCADA TRACE MODE 7 (Адастра, Москва).


















